カメラとソナーを使って駐車位置を検出します。複数の駐車位置を検出できます。
カメラを使い、駐車区画線を認識し駐車位置を表示します。
ソナーにより、検出した駐車区画内に障害物を検知した場合は駐車位置を表示しません。

フロントビュー、サイドビュー、リヤビューカメラのいずれかのカメラのレンズに汚れ、水滴などが付着しているときは検出できる駐車位置に制限がかかる場合があります。
|
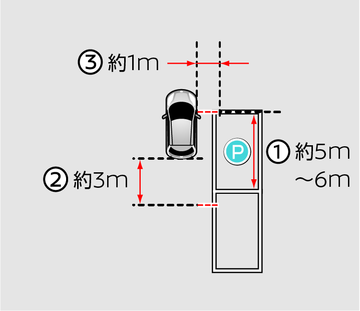
以下の条件で駐車位置を検出します。
|

|
|
|
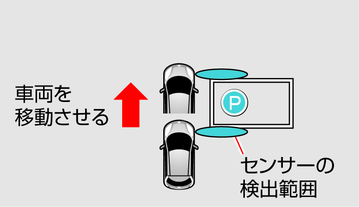
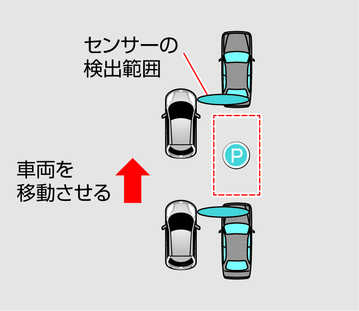
フロントのセンサーの検出範囲がカメラにより検出された駐車区画上を通過し、障害物を検知した場合は駐車位置を表示しません。 センサーの検出範囲より遠くにある駐車区画内の障害物は検出できません。 |
|
|
|
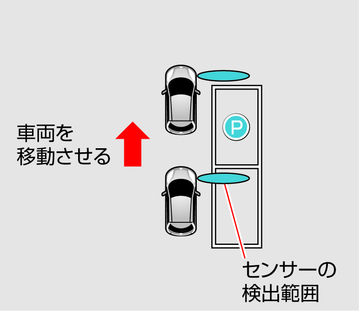
以下の条件で駐車位置を検出します。
|
|
|
|
フロントのセンサーの検出範囲がカメラにより検出された駐車区画上を通過し、障害物を検知した場合は駐車位置を表示しません。 センサーの検出範囲より遠くにある駐車区画内の障害物は検出できません。 |
|
|
|
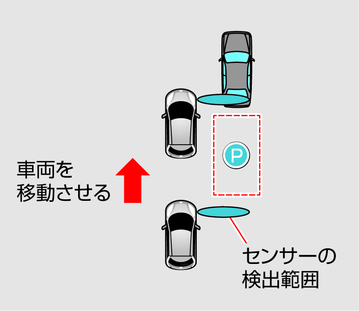
駐車区画線が認識されない場合は、ソナーを使って周囲の障害物から駐車場所を検出します。 周囲の障害物の位置や角度によっては駐車目安枠は大きくずれる場合があります。 |
|
|
|
|
|